如若轉(zhuǎn)載,請注明出處:http://www.cdhuidai.cn/product/69.html
更新時間:2026-06-01 18:18:52
鄭州人工智能與軟件開發(fā)培訓(xùn)指南 價格、機構(gòu)與學(xué)習(xí)路徑
日本留學(xué)ai人工智能專業(yè)怎么樣
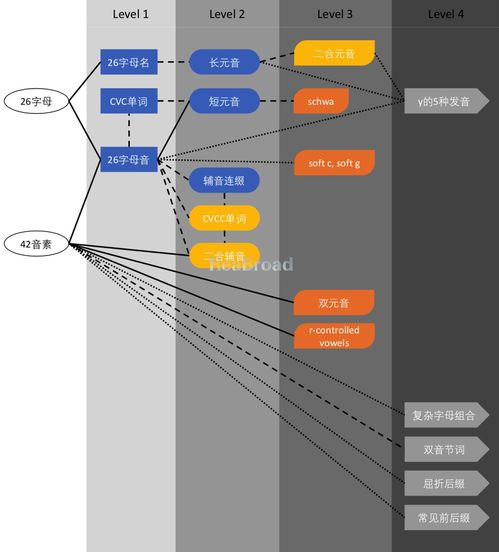
獲國家發(fā)明專利 基于知識圖譜等人工智能技術(shù)的自然拼讀測評系統(tǒng)
科技出行企業(yè)碳中和 當(dāng)人工智能為綠色按下加速鍵
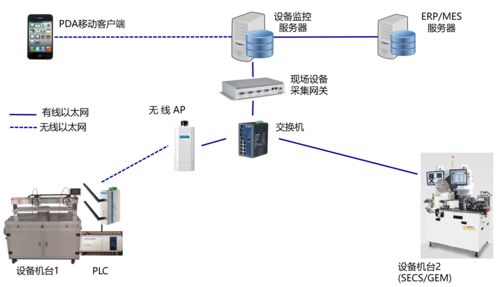
智能制造浪潮下,智能工廠規(guī)劃的核心要素、維度與AI基礎(chǔ)軟件的關(guān)鍵作用
人工智能基礎(chǔ)軟件開發(fā) 引領(lǐng)電子產(chǎn)品世界的新引擎
機器城邦A(yù)I人工智能體驗店加盟投資解析與人工智能基礎(chǔ)軟件開發(fā)前景
智能感知與軟件基石 人工智能產(chǎn)業(yè)雙輪驅(qū)動下的傳感器市場新機遇
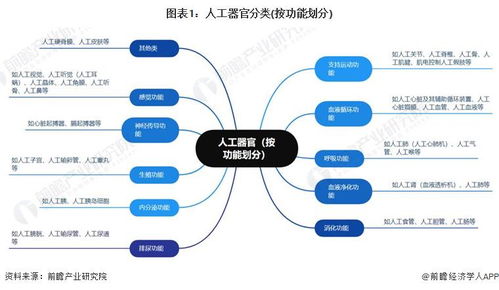
預(yù)見2024 中國人工器官行業(yè)全景圖譜
2021年中國人工智能產(chǎn)業(yè)趨勢展望與元創(chuàng)貓AI教育對兒童科學(xué)發(fā)展的助推
地址:成都市溫江區(qū)柳林南路219號科創(chuàng)城科創(chuàng)大廈T3棟7層704號
Copyright © 2026 www.cdhuidai.cn 人工智能基礎(chǔ)軟件開發(fā) 四川小咖科技有限公司 人工智能基礎(chǔ)軟件開發(fā) 版權(quán)所有 Sitemap